

درایو فرکانس متغیر چیست؟ و کاربرد آن
در این مقاله با VFD و کاربردهای آن آشنا می شویم. همچنین کانورتر و لینک DC را به طور مفصل پوشش خواهیم داد. در نهایت، ماژول IGBT و اینکه چگونه PWM اجازه کنترل خروجی AC به موتور را برای کنترل دقیق سرعت موتور می دهد را بررسی خواهیم کرد.

سرعت چرخش موتور AC
موتورهای القایی یا جریان متناوب الکتریکی با سرعتی می چرخد که وابسته به تعداد قطب های سیم پیچی داخل موتور و فرکانس برق تغذیه موتور می باشد.
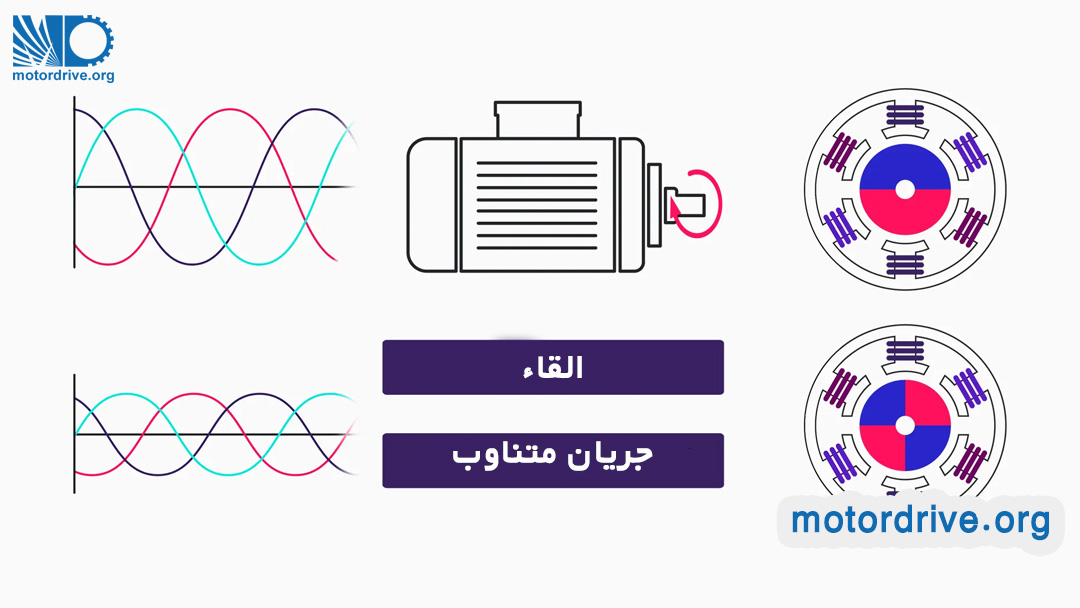
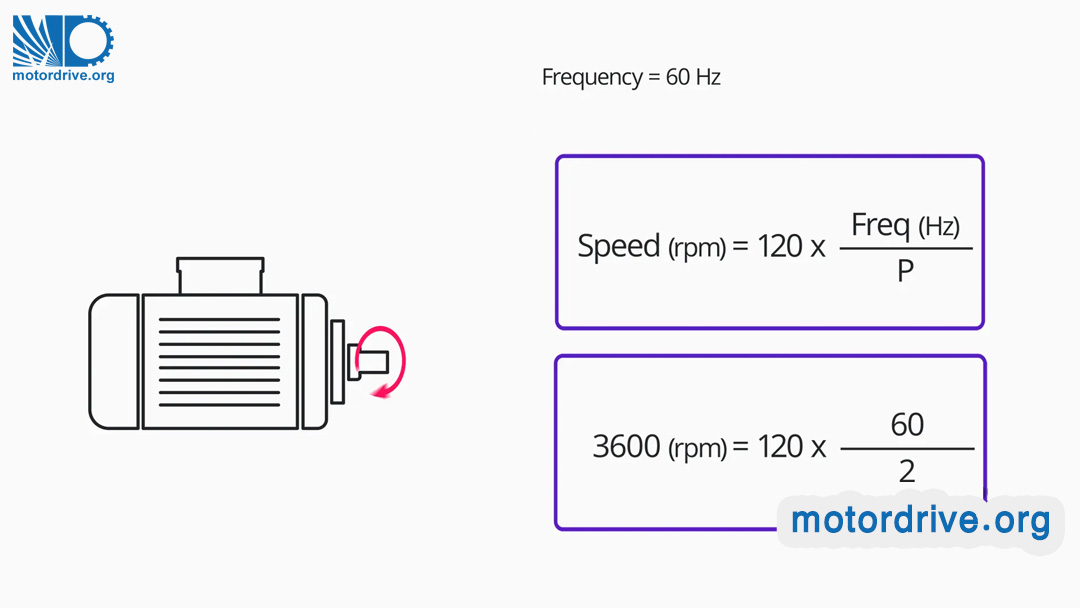
فرکانس (اندازهگیری شده بر حسب هرتز) مستقیماً با سرعت چرخش موتور بر حسب دور بر دقیقه (RPM) مرتبط است. هرچه فرکانس بیشتر باشد، سرعت چرخش موتور بیشتر می شود.
ویدئوی مربوط به این مقاله در مرکز تحقیقات موسسه موتور درایو ترجمه و زیرنویس شده است که در ادامه مشاهده می کنید.
در ایران تاسیسات الکتریکی برق جریان متناوب را با فرکانس 50 هرتز توزیع می کنند. یک موتور AC دو قطبی استاندارد که در این فرکانس کار می کند، سرعت چرخش اسمی 3000rpm خواهد داشت.
کاهش سرعت
در برخی از کاربری ها نیاز نداریم که موتور در سرعت نامی خود یعنی 3000rpm کار کند که این مساله خیلی متداول است. چندین راهکار برای این موضوع وجود دارد.
1- استفاده از کاهنده های سرعت مکانیکی
به طور مکانیکی سرعت خروجی را با افزایش گشتاور کاهش می دهد – چرخ دنده خروجی دندانه های بیشتری نسبت به چرخ ورودی دارد.
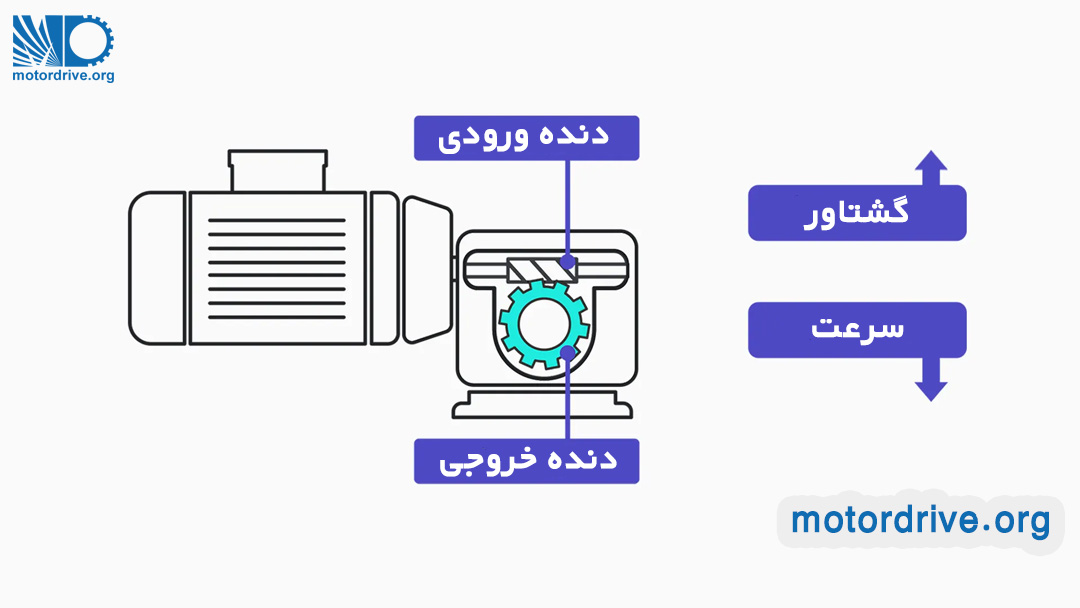
گیربکس ها نیاز به روغن کاری دارند، انعطاف پذیری ندارند، ارتعاش و نویز ایجاد می کنند و در صورتیکه طول شفت زیاد باشد، مناسب نیستند.
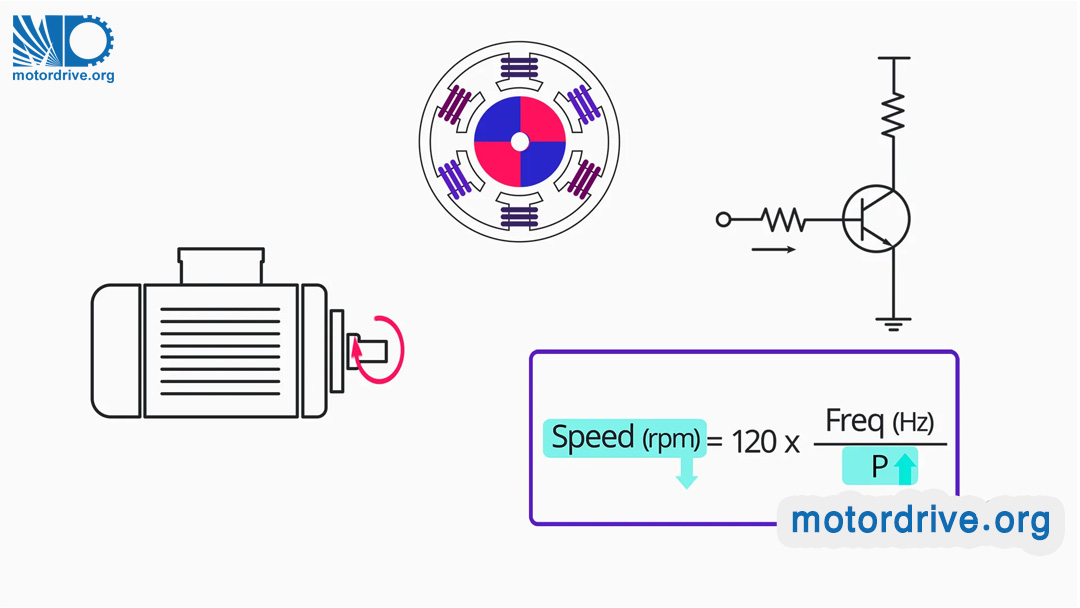
2- افزایش تعداد قطبهای سیم پیچی موتور
سرعت را بدون تغییر در ساختار موتور و بصورت الکتریکی کاهش می دهد. در حال حاضر، سیستمهای ترانزیستوری وجود دارند که اجازه میدهند قطبهای داخل موتورها روشن و خاموش شوند. با این حال، این سیستمها میتوانند پیچیده باشند و کنترل خوبی را ارائه نکنند.
3-استفاده از اینورتر یا درایو فرکانس متغیر (VFD)
به رسیم به بحث اصلی ، درایو فرکانس متغیر چیست ؟
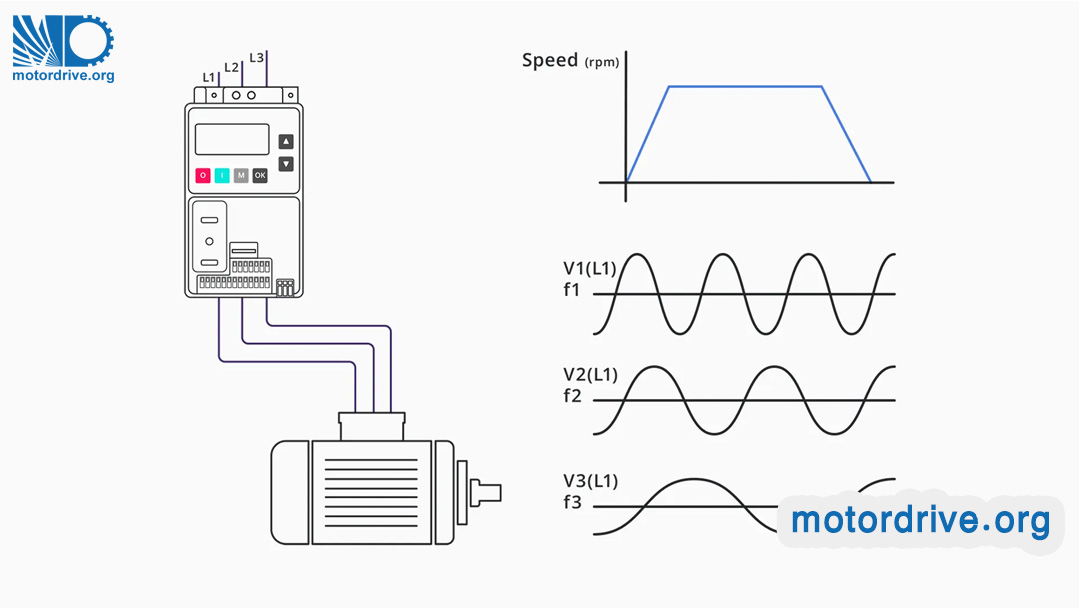
می توان آن را برای تولید یک افزایش سرعت به صورت شیب، فرکانس و ولتاژ مورد نیاز پیکربندی و تنظیم کرد تا موتور مطابق با نیاز بار (سرعت و ولتاژ مورد نظر) کار کند.
یکی از ویژگی های مهم درایو فرکانس متغیر این است که با نیاز به تغییر سرعت موتور در یک کاربری خاص، درایو به سادگی می تواند سرعت موتور را افزایش یا کاهش دهد تا نیازهای عملیاتی جدید را برآورده کند، که در غیر این صورت تنها با استفاده کاهش دهنده سرعت مکانیکی یا سیستم ترانزیستوری یا قطبهای بیشتر امکان پذیر نمی باشد.
کاربردهای درایو فرکانس متغیر یا VFD
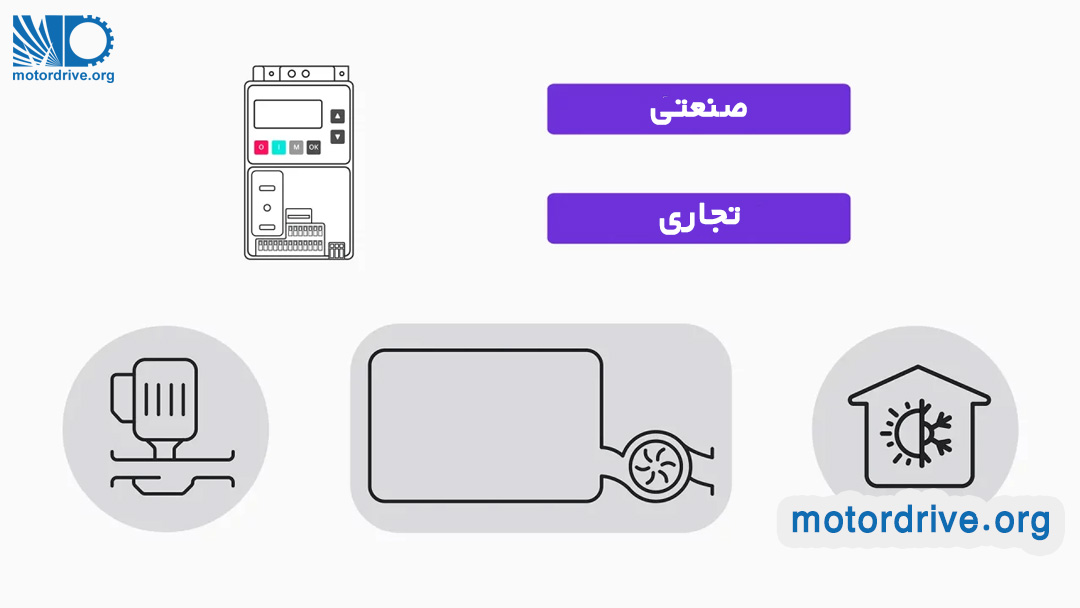
استفاده از VFD ها در بسیاری از کاربردهای صنعتی و تجاری گسترده است.
– در کاربردهای صنعتی، VFD ها برای کنترل اکسترودرها، جرثقیل های برقی، ترن هوایی، و حتی در شهربازی در گاوهای مکانیکی یا کاربری های وسیع دیگر استفاده می شوند.

– در کاربردهای تجاری، VFD ها به طور گسترده در پمپ ها برای کنترل جریان و حتی کنترل حجم یک مخزن، و همچنین در صنعت تهویه مطبوع HVAC استفاده می شوند. این فناوری به عنوان فناوری سبز در نظر گرفته می شود.

در نهایت، یک درایو فرکانس متغیر VFD فرکانس تغذیه به موتور AC را به منظور کنترل سرعت آن تغییر می دهد. و بدین وسیله راه اندازی نرم و تنظیم سرعت موتور طبق نیاز کاربری ممکن می شود.
حالا که ما فهمیدیم درایو فرکانس متغیر کجا و چگونه استفاده می شود. بیایید به نحوه عملکرد یک درایو فرکانس متغیر بپردازیم.
مدار الکتریکی یک درایو فرکانس متغیر یا VFD
بیایید یک نگاهی به دیاگرام یک درایو فرکانس متغیر یا VFD بیاندازیم:
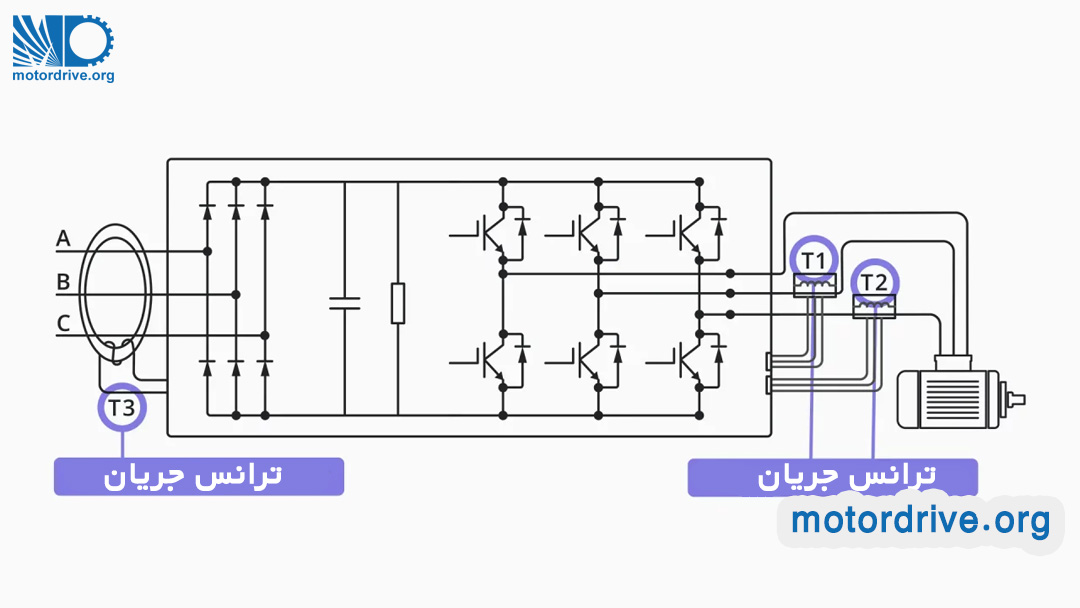
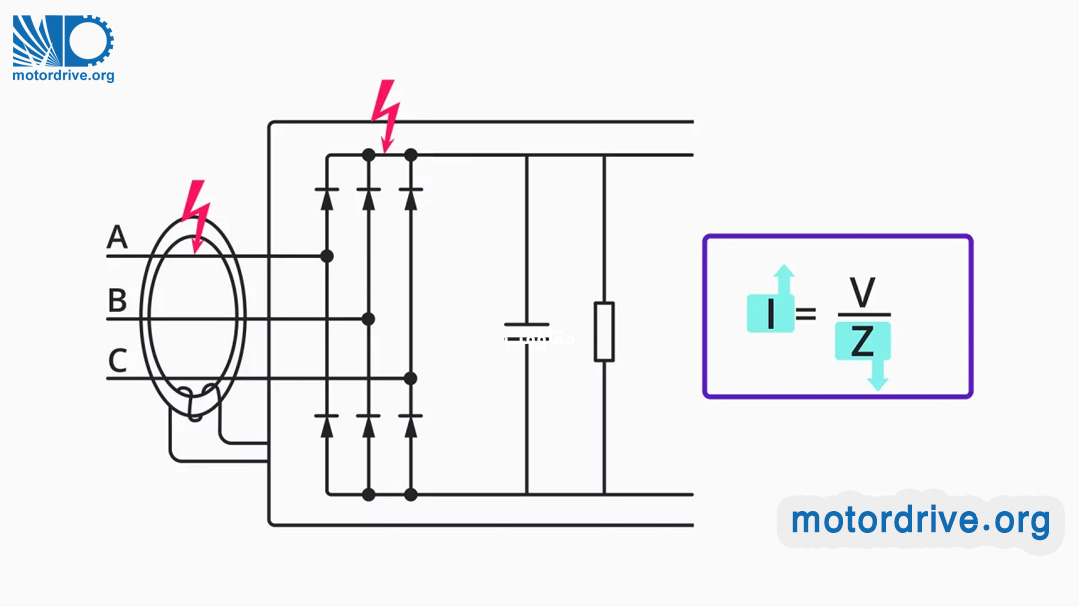
اولین چیزی که می بینیم یک ترانسفورماتور جریان (T3) است که وظیفه اندازه گیری جریان ورودی به VFD ما را دارد، به طوری که کنترل های VFD می توانند جریان ورودی و خروجی از VFD را – که توسط دو ترانسفورماتور جریان نشان داده شده با T1 و T2 اندازه گیری می شود، مقایسه کنند.
اگر جریان اندازه گیری شده متفاوت باشد، VFD به دلیل چیزی که ما آن را خطای زمین می نامیم، امکان ادامه کار را از دست می دهد.
مبدل یا یکسو کننده شش پالس
در ادامه، مبدل را داریم که یکسو کننده نیز نامیده می شود. اگر بخواهیم یکسو کننده را بسط دهیم و به نمودار یکسو کننده نگاه کنیم، به صورت زیر خواهد بود:
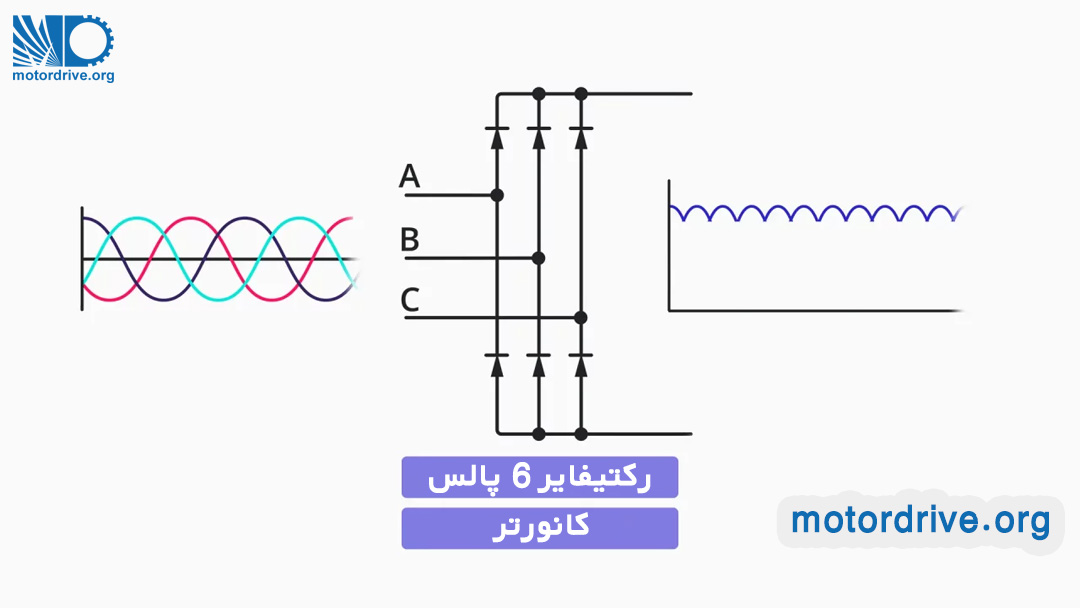
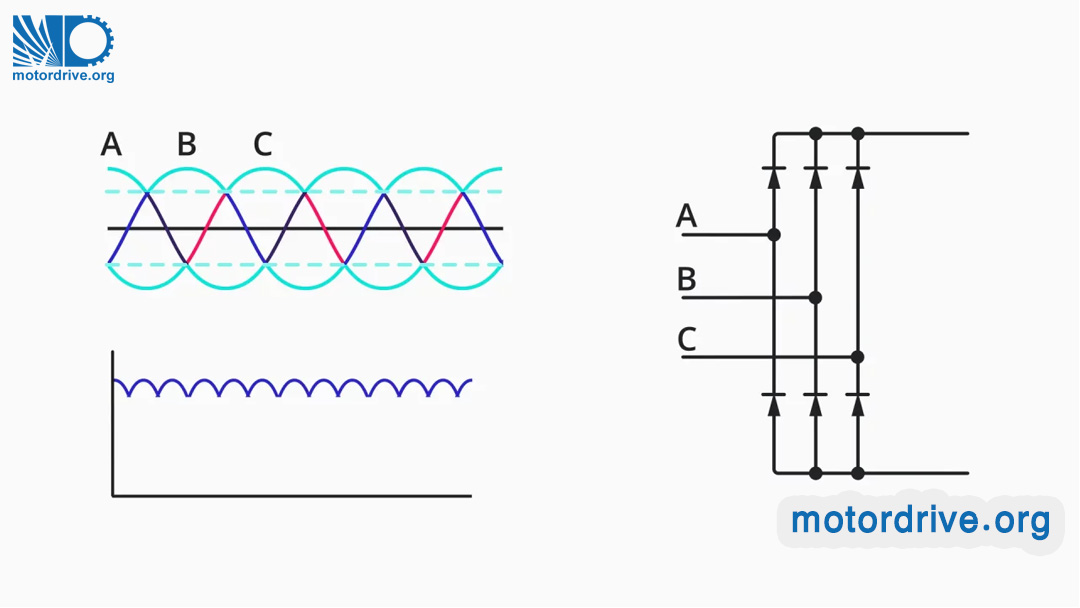
این مبدل یا رکتیفایر شش پالس نامیده می شود، و اینجاست که جریان متناوب سه فاز با استفاده از دیودها به جریان مستقیم تبدیل می شود.
با استفاده از مقایسه با یک سیستم هیدرولیک، آن (شش) دیود را می توان معادل شیر یک طرفه در نظر گرفت. شکل اتصال دیودها به یکدیگر بسیار استراتژیک است.
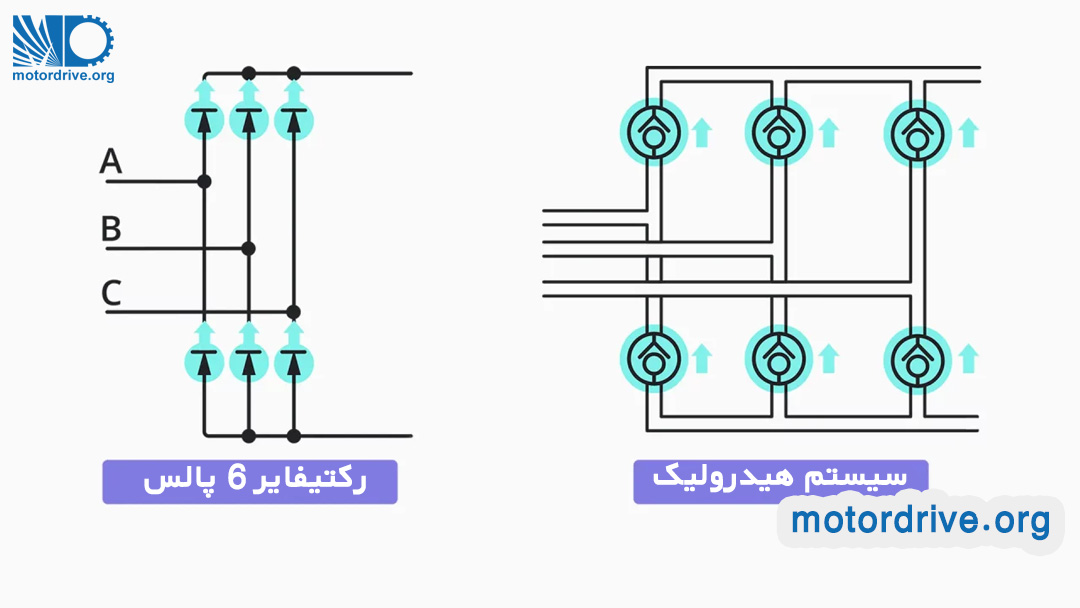
شیر یک طرفه فقط در یک جهت اجازه عبور جریان را می دهد، مانند عبور جریان در دیودهای ما (که جهت عبور جریان با فلش بر روی نماد دیود نشان داده شده است.)
جریان الکتریکی در جهت فلش روی نقشه دیود از آن عبور می کند، یعنی جریان از آند به سمت کاتد می رود، همانطور که در تصویر زیر نشان داده شده است.
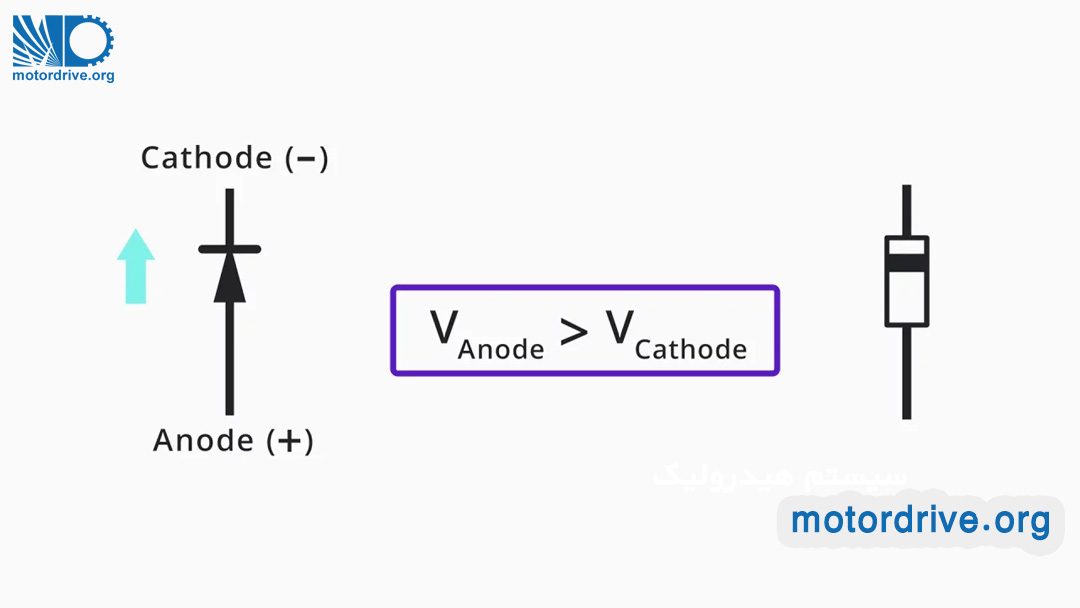
تنها زمانی جریان الکتریکی برقرار خواهد داشت که ولتاژ آند بیشتر از کاتد باشد.
- هنگامی که ولتاژ فاز A بیشتر از فازهای B یا C شود، دیود فاز A باز شده و جریان برق اجازه می یابد که جاری شود.
- هنگامی که فاز B بیشتر از فاز A بشود، آنگاه دیود فاز B باز می شود در حالیکه دیود فاز A بسته شده است.
- همین موضوع برای فاز C و همچنین دیودهای بر روی بخش منفی باس DC نیز برقرار است.
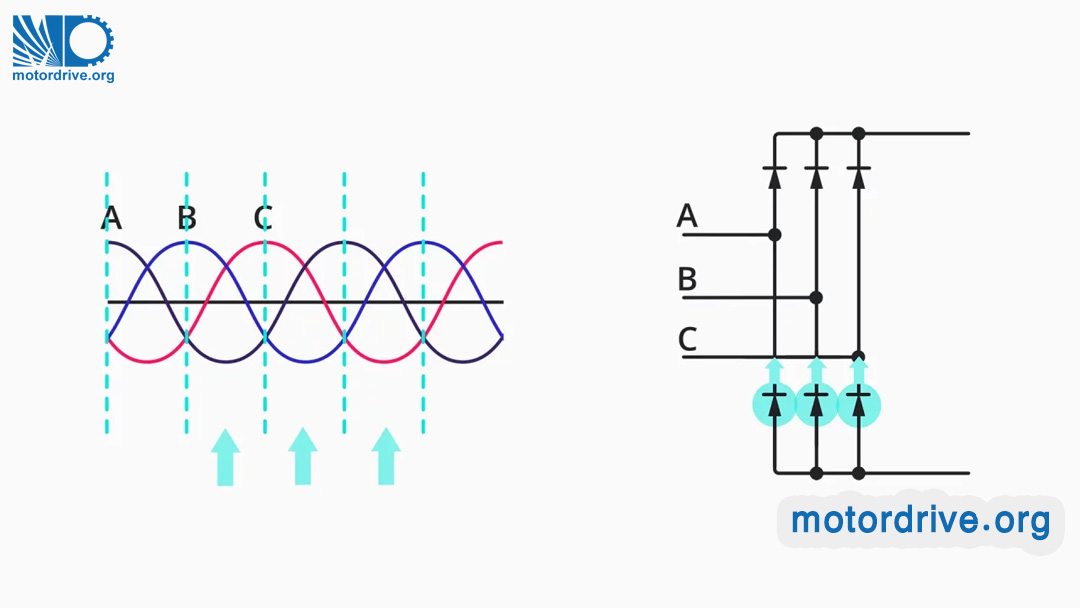
با باز و بسته شدن هر دیود، شش پالس جریان ایجاد می شود. شکل موج حاصل به صورت زیر خواهد بود:
باس DC یا فیلتر DC و بافر
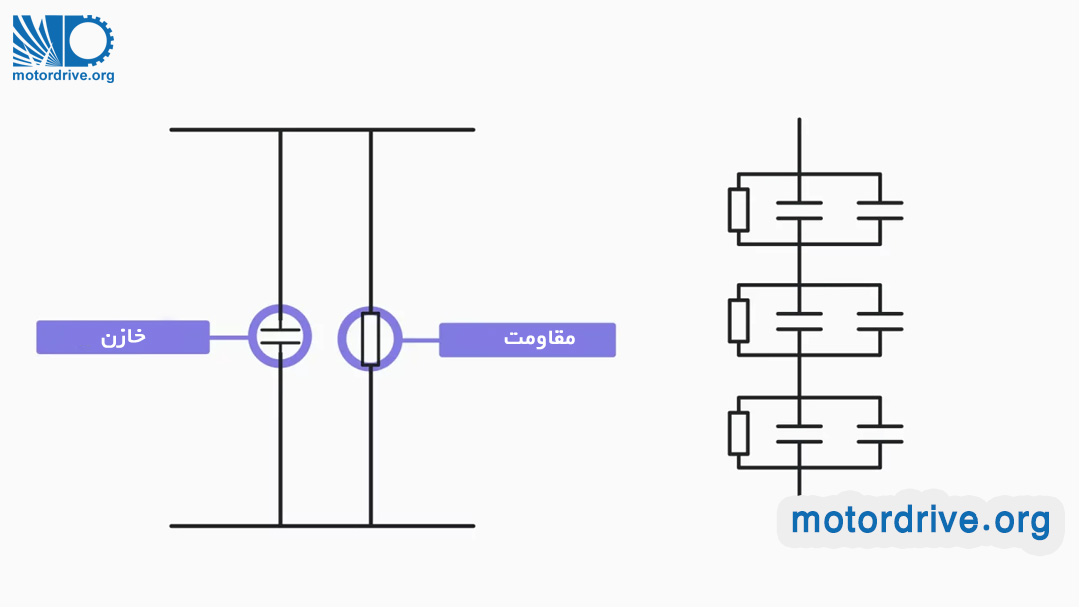
سپس، ما فیلتر و بافر DC را داریم که به گذرگاه DC یا باس DC نیز معروف است گذرگاه DC تنها با یک خازن و مقاومت در نمودار نشان داده می شود، اما در واقعیت، خازن ها و مقاومت های مختلفی به صورت سری و موازی وجود دارد.
هنگامی که خازن ها شارژ نشده اند، امپدانس آنها بسیار کم است. اگر بخواهیم آنها را شارژ کنیم، جریان هجومی اولیه می تواند به دستگاه های برق ورودی یا یکسو کننده/مبدل آسیب برساند، البته در صورتی که فیوزهای ورودی مدار را قطع نکنند.
بنابراین در عوض، ما یک مدار پیش شارژ داریم. پیش شارژ یک مدار محدود کننده جریان است که سرعت شارژ خازن های باس DC را در هنگام روشن شدن کاهش می دهد.
مدار پیش شارژ نشان داده شده در اینجا از موارد زیر تشکیل شده است:
- یک کنتاکت (اتصال)
- یک مقاومت
- یک ترموستات
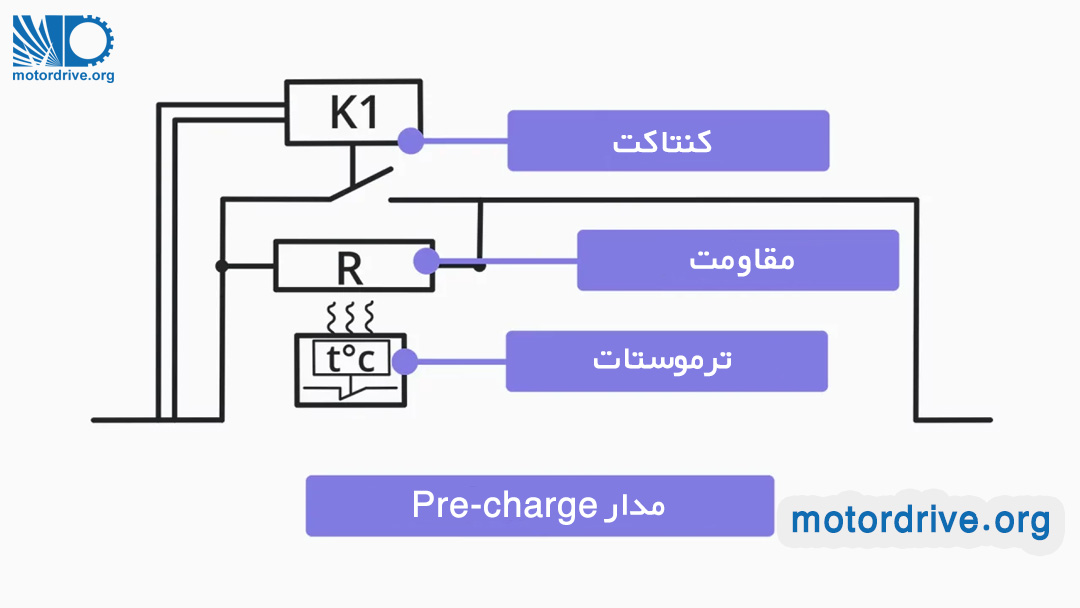
هنگامی که ما VFD خود را به برق وصل می کنیم و بانک خازن ها هنوز شارژ نشده است، خازن ها توسط مقاومت ها شروع به شارژ می کنند – زمانی که کنترل های VFD تشخیص دهند که لینک DC کاملاً شارژ شده است، سپس کنتاکت را می بندد و به مسیری با کمترین مقاومت برای عبور جریان الکتریکی تبدیل می شود.
در حالتی که کنتاکتور بسته نشود و VFD همچنان موتور را راه اندازی کند، جریان عبوری از مقاومت افزایش خواهد یافت که باعث گرم شدن بیش از حد مقاومت پیش شارژ می شود. در این حالت ترموستات عمل می کند و VFD را به دلیل گرمای بیش از حد غیرفعال می کند.
حالا بیایید به گذرگاه DC برگردیم – عملکرد مقاومت آن تقسیم ولتاژ است و تضمین می کند که همه خازن ها ولتاژ یکسانی دارند.

IGBT ها
در نهایت IGBTها را داریم که در آخرین طبقه خروجی داریو قرار دارند. مبدل DC به AC و خروجی PWM ما.
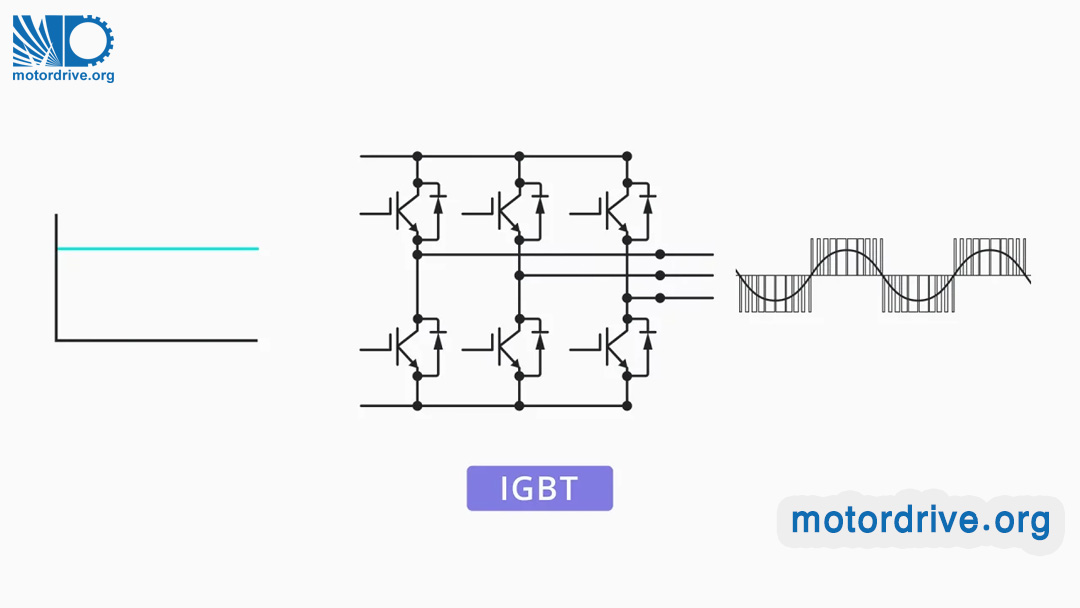
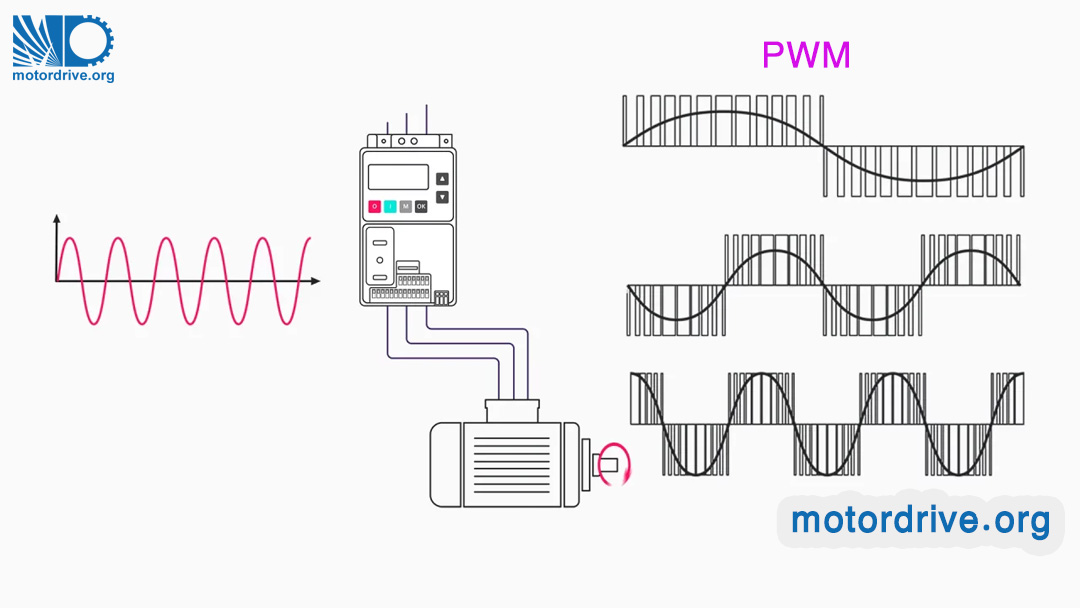
می دانیم که این مرحله آخر جریان مستقیم را به جریان متناوب به عنوان خروجی مدولاسیون عرض پالس تبدیل می کند. اما به چه معنا است؟ و چگونه این اتفاق می افتد؟
صحبت در مورد VFD ها و ترانزیستورهای دوقطبی گیت عایق، که به عنوان IGBT نیز شناخته می شوند، بدون درک اینکه مدولاسیون عرض پالس (PWM) چیست، غیرممکن است.
یک سیگنال ورودی آنالوگ را می توان با تولید پالس های عرض متغیر برای نمایش دامنه آن مدوله کرد. در یک خلاصه بسیار کوتاه، PWM راهی برای کنترل سیگنال های آنالوگ با خروجی دیجیتال است.
برای درک عملکرد IGBT در VFD، مهم است که بدانیم عملکرد یک IGBT به تنهایی چگونه است.
IGBT چگونه کار می کند؟
در سادهترین سطح، یک ترانزیستور دوقطبی گیت عایق (IGBT) کلیدی است که برای اجازه دادن به عبور جریان برق هنگام روشن شدن و مسدود کردن جریان در هنگام خاموش شدن استفاده میشود.
البته لازم به ذکر است که این قطعات قابلیت روشن و خاموش شدن (سوئیچینگ) چندین هزار بار در ثانیه را دارند!
IGBT یک تجهیز حالت جامد است، به این معنی که هیچ بخش متحرکی ندارد. به جای باز و بسته کردن یک اتصال فیزیکی، با اعمال ولتاژ به یک جزء نیمه هادی به نام گیت عمل می کند که خواص آن را برای ایجاد یا مسدود کردن یک مسیر الکتریکی تغییر می دهد.
بیایید از نزدیک به یک IGBT معمولی نگاه کنیم: پایه ها (پین ها) نشان دهنده گیت Gate، کلکتور Collector و امیتر Emitter هستند.
جریان در امتداد مسیر رسانایی تشکیل شده توسط کلکتور و امیتر جریان می یابد، در حالی که گیت دستگاه را کنترل می کند.در شکل زیر طرح واره ای که نشان دهنده این تجهیز است نشان داده شده است.
IGBT مانند یک سوئیچ رفتار می کند. همانطور که خود کلمه نشان می دهد،
- هنگامی که ولتاژ مثبت اعمال می شود گیت باز خواهد شد (روشن می شود)، و جریان اجازه می یابد از کلکتور به امیتر برقرار شود.
- اگر ولتاژ کافی اعمال نشود، گیت بسته باقی می ماند (خاموش می شود) و جریان اجازه پیدا نمی کند از کلکتور به امیتر برقرار شود.
برای جلوگیری از بسته شدن ناخواسته مسیر کلکتور به امیتر، ولتاژ گیت در حالت خاموش منفی نگه داشته می شود.
سیگنال PWM
حال که ما فهمیدیم IGBT ها چگونه کار می کنند، بیایید به کاربرد IGBT ها در VFD ها برگردیم، بیایید برای درک ساده تر IGBT های خود را به صورت کلیدهای ساده نشان دهیم.
IGBT های بالایی که در تصویر ما سوئیچ هستند در مثبت باس DC و پایینی ها در منفی باس DC هستند، بنابراین وقتی یکی از کلیدهای بالایی بسته می شود، فاز و ولتاژ موتور مثبت می شود.
از طرف دیگر، وقتی یکی از کلیدهای پایینی بسته می شود، آن فاز و ولتاژ موتور منفی می شود.
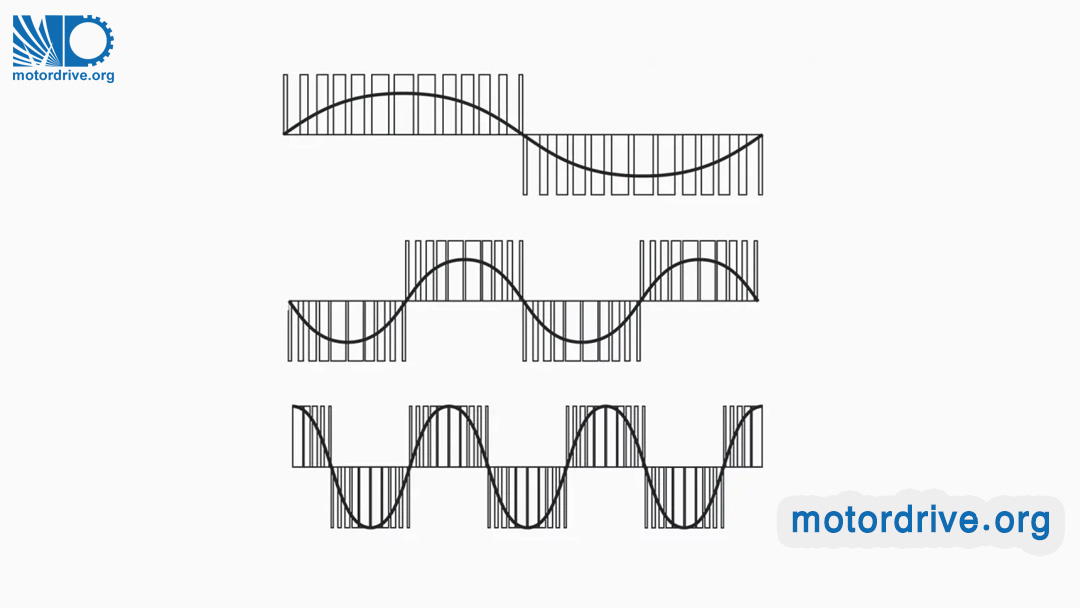
بنابراین، با کنترل سرعت و ترتیب باز و بسته شدن آن سوئیچ ها، می توانیم فازها و فرکانس سیگنال خود را کنترل کنیم: صفر، منفی یا مثبت.
توجه به این نکته ضروری است که سیگنال خروجی VFD یک سیگنال PWM است که یک شکل موج مستطیلی است.
این موج در عملکرد درایو فرکانس متغیر یا VFD بسیار مهم است، زیرا این ولتاژ و فرکانس متغیر است که VFD را قادر میسازد سرعت موتور را کنترل کند.
برنامه پردازشگر کنترل VFD
پردازشگر کنترل VFD شامل یک برنامه است که که معمولاً برای کاربر قابل دسترسی نیست. با این وجود، پارامترها و تنظیمات زیادی وجود دارد که می توان تنظیم کرد تا عملکرد بهینه VFD برای هر کاربری برای برآوردن مشخصات و نیازهای خاص موتور و تجهیزات محرک تامین گردد.
موارد زیر پارامترهای قابل تغییر و تنظیمات عمومی در یک VFD می باشند.
قابل تنظیم: تناسب، انتگرال و مشتق گیر یا همان PID
سرعت حداقل و حداکثر
محدوده جریان و بسیاری تنظیمات دیگر
تعداد پارامترها بر اساس سطح پیچیدگی VFD متفاوت است. آنها می توانند از 50 تا بیش از 200 پارامتر متغیر باشند!

خلاصه
درایوهای فرکانس متغیر امکان کنترل دقیق سرعت موتور را با تغییر فرکانس و ولتاژ منبع تغذیه آن فراهم می کنند.
درایوهای فرکانس متغیر، دستگاههای کنترلکننده موتور هستند که در کاربردهای عددی، از وسایل کوچک تا کمپرسورهای بزرگ، و کاربدهای متنوع بین آنها استفاده می شوند.
عملکرد اصلی VFD هدایت و کنترل گشتاور و سرعت موتور برای برآوردن نیازهای کاربری با تغییر ولتاژ و فرکانس منبع تغذیه است.
چندین طبقه در کنترل کننده VFD وجود دارد.
- مرحله ورودی درایو جایی است که جریان متناوب به اینورتر وارد می شود.
-
برای نگهداری و حفاظت از درایو، ترانسفورماتورهای جریان، جریان ورودی و خروجی VFD را اندازه گیری و مقایسه می کنند و خطاهای زمین را بررسی می کنند. همچنین با استفاده از مدار پیش شارژ از آسیب جریان هجومی اولیه جلوگیری می شود.
-
در مرحله بعدی درایو – جریان متناوب توسط یکسو کننده یا مبدل شش پالس به جریان مستقیم تبدیل می شود.
-
این جریان مستقیم در گذرگاه DC بافر و فیلتر می شود، جایی که عملکرد مقاومت آن تقسیم ولتاژ و یکسان شدن ولتاژ همه خازن ها را تضمین می کند.
در ادامه
-
این جریان مستقیم که اکنون فیلتر شده است می تواند یک بار دیگر به جریان متناوب تبدیل شود این کار توسط IGBT ها که مشابه سوئیچ ها عمل می کنند انجام می شود اجازه می دهند فازها و فرکانس سیگنال ما را به شکل خروجی مدوله شده با عرض پالس کنترل کنند.
-
در نهایت، مرحله ارسال قطار پالس به موتور است که این خروجی مدوله شده عرض پالس اجازه کنترل سرعت موتور و در نتیجه خروجی مکانیکی آن را می دهد.
VFD ها به طرز فوق العاده ای تکامل یافته اند. آنها به دستگاه های توان فرکانس بالا بسیار پیچیده در قالب کنترل کننده های مجهز به ریزپردازنده تبدیل شده اند.
استفاده از VFD ها فرآیندهای عملیاتی قابل پیش بینی، روان تر، بادوام و بسیار کارآمد را ممکن می سازد!



{kind=link}
بدون دیدگاه